반응형
- 시작하기 전
- 앞선 글인 String토픽 생성을 기반으로 작성하였다.
- 기존 String전송과 차이점만 적어놓았으므로 처음이라면 아래의 글을 참고 하기 바란다.
- ROS2 패키지만들기-1(패키지 생성) (https://hostramus.tistory.com/112)
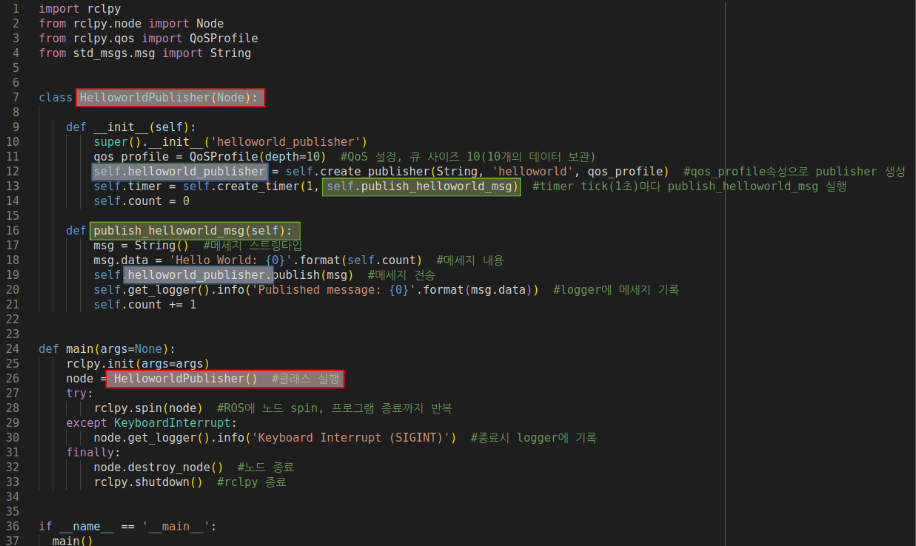
- ROS2 패키지만들기-2(노드생성 publisher) (https://hostramus.tistory.com/113)
- ROS2 패키지만들기-3(노드생성 Subscriber) (https://hostramus.tistory.com/114)
- ROS2 패키지만들기-4(확인 및 실행) (https://hostramus.tistory.com/115)
- 목표
- 2개의 정수를 퍼블리시하는 토픽 만들기
- std_msgs.msg의 Int8MultiArray 사용해보기
- 2개의 정수를 퍼블리시 하기
- 2개의 정수를 서브스크라이브하여 합계 계산하기
- 퍼블리셔 코드 (Publisher Code)
import rclpy from rclpy import node from rclpy.node import Node from rclpy.qos import QoSProfile from std_msgs.msg import Int8MultiArray class HelloworldPublisher222(Node): def __init__(self): super().__init__('helloworld_publisher222') qos_profile = QoSProfile(depth=10) self.count = 0 self.helloworld_publisher = self.create_publisher(Int8MultiArray, 'helloworld', qos_profile) self.timer = self.create_timer(1, self.publish_helloworld_msg) def publish_helloworld_msg(self): msg = Int8MultiArray() msg.data = [self.count, self.count+1] self.helloworld_publisher.publish(msg) self.get_logger().info('pub22 message: {0}'.format(msg.data)) self.count += 1 def main(args=None): rclpy.init(args=args) node = HelloworldPublisher222() try: rclpy.spin(node) except KeyboardInterrupt: node.get_logger().info('Keyboard Interrupt (SIGINT)') finally: node.destroy_node() rclpy.shutdown() if __name__ == '__main__': main() - 코드 분석 (Publisher)
-
from std_msgs.msg import Int8MultiArray- 5행의 메세지 종류를 Int8MultiArray로 import한다.
- int8은 8비트정수로 -127~127까지 범위다
- int16, int32, int64중 원하는 크기로 사용한다.
-
self.helloworld_publisher = self.create_publisher(Int8MultiArray, 'helloworld', qos_profile)- 12행의 self.create_publisher에서 퍼블리시 할 형식을 기존 String대신 Int8Multiarray로 설정한다.
- 다른 것은 모두 그대로 놔둔다.
-
msg = Int8MultiArray() msg.data = [self.count, self.count+1]- 16행의 msg에 Int8MultiArray 인스턴스를 생성한다.
- 17행에서 msg.data의 값을 array형태로 만들어 넣는다.
- 여기에서는 count를 사용하였다.
-
- 서브스크라이버 코드 (Subscriber Code)
import rclpy from rclpy.node import Node from rclpy.qos import QoSProfile from std_msgs.msg import Int8MultiArray class HelloworldSubscriber222(Node): def __init__(self): super().__init__('Helloworld_Subscriber222') qos_profile = QoSProfile(depth=10) self.helloworld_subscriber = self.create_subscription(Int8MultiArray, 'helloworld', self.subscribe_topic_message, qos_profile) def subscribe_topic_message(self, msg): b = msg.data[0] c = msg.data[1] self.get_logger().info('Receiced message: {0}'.format(msg.data)) self.get_logger().info(str(b) + " + " + str(c) + " = " + str(b+c)) def main(args=None): rclpy.init(args=args) node = HelloworldSubscriber222() try: rclpy.spin(node) except KeyboardInterrupt: node.get_logger().info('Keyboard Interrupt (SIGINT)') finally: node.destroy_node() rclpy.shutdown() if __name__ == '__main__': main() - 코드 분석 (Subscriber)
-
from std_msgs.msg import Int8MultiArray- 4행에서 퍼블리셔와 같이 메세지 형식을 Int8MultiArray로 맞춰서 import한다.
-
self.helloworld_subscriber = self.create_subscription(Int8MultiArray, 'helloworld', self.subscribe_topic_message, qos_profile)- 10행에서 self.create_subscription에서 Int8MultiArray로 맞춰준다.
-
def subscribe_topic_message(self, msg): b = msg.data[0] c = msg.data[1] self.get_logger().info('Receiced message: {0}'.format(msg.data)) self.get_logger().info(str(b) + " + " + str(c) + " = " + str(b+c))- msg.data는 Array형태이다.
- b와 c에 msg.data[0]과 msg.data[1]의 데이터를 받는다.
- self.get_logger().info(str(b) + " + " + str(c) + " = " + str(b+c))
- self.get_logger().info()는 스트링타입을 인수로 받는다.
- 따라서 정수인 b,c를 str()을 이용하여 변환해준다.
- msg.data는 Array형태이다.
-
- 실행
- 퍼블리셔 실행 화면

- self.count의 값이 array형태로 퍼블리시 되는것이 확인 된다.
- 위의 코드상 int8형식이기에 127이 넘어가는 순간 에러가 발생한다.
- 서브스크라이버 실행 화면

- 서브스크라이버는 받은 데이터(msg.data)를 한번 출력 후에 두 정수의 합계를 출력한다.
- 퍼블리셔 실행 화면
아래 출처의 내용을 수정 변경하였습니다.
개인적 공부를 위해 올린 글로 공부하실분은 아래 링크의 글을 참고하시기 바랍니다.
출처 : 오로카 카페 (cafe.naver.com/openrt/24450)
반응형
'ROS2' 카테고리의 다른 글
| ROS2 패키지 만들기 - 4 (확인 및 실행) (0) | 2021.04.21 |
|---|---|
| ROS2 패키지 만들기 - 3 (노드 생성 - subscribe) (0) | 2021.04.21 |
| ROS2 패키지 만들기 - 2 (노드 생성 - publisher) (0) | 2021.04.21 |
| ROS2 패키지 만들기 - 1 (패키지 생성) (0) | 2021.04.20 |